机器人
发挥协作机器人潜力的安全措施 | 中国
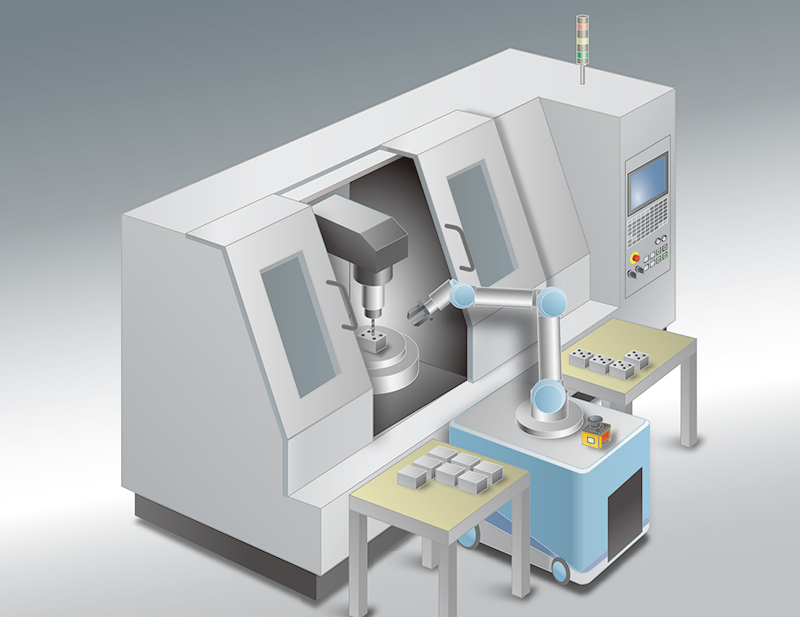
由检出人员存在的扫描器使机器人高速且安全地运行
引进机器人后只能低速运行,效率未得到提高
在汽车工厂金属零部件加工等日产量波动较大的生产线上,人机协作正逐渐成为主流趋势。
当产量突然变化,导致作业人员过剩或不足时,通过机器人替代人工,既能避免人工成本浪费,也能解决产量不足的问题。但人机协同作业也存在安全顾虑:为保障人员安全,无安全栅环境下需将机器人切换为低速运行,可低速运行又会影响生产效率,导致高成本引进的机器人无法充分发挥作用。
工业机器人制造商在充分了解这些现场痛点后,想必也在困扰如何开发出一种人机共存的解决方案 —— 既能确保安全,又不会降低生产效率的机器人。
能检测是否有人员存在的扫描器有助于兼顾生产性和安全性
如何在确保安全的同时提升生产效率?爱德克(IDEC)多年来始终致力于解决生产现场的这类核心问题。
针对这一需求,爱德克提出的解决方案是:采用可检测人员存在、并据此切换机器人运行速度的系统。具体而言,通过搭配使用爱德克 “SE2L 型安全激光扫描器” 与协作机器人,当检测到人员时,机器人可自动切换为低速运行或停止状态;而当附近无人员时,机器人便恢复高速运行,从而充分发挥生产效率。此外,该系统还能根据人员与机器人的距离灵活切换模式,例如 “人员位于半径 3 米范围内时切换为低速,位于半径 1 米范围内时则停止运行”,可根据不同工序需求灵活适配。
有关人机协作环境的安全措施,请向IDEC咨询
作为机械安全领域的专家,爱德克(IDEC)始终致力于保障各类生产现场的安全。依托多年积累的经验与技术知识,爱德克当前重点聚焦人机协作场景,专注于解决该场景下的协作安全问题,并提供配套的各类安全产品。同时,爱德克还会为客户提供专业建议,助力其在确保安全的基础上提升生产效率。
若您在机器人安全方面有任何疑问,欢迎随时咨询爱德克(IDEC)。
