什么是3位置使能开关 | 中国
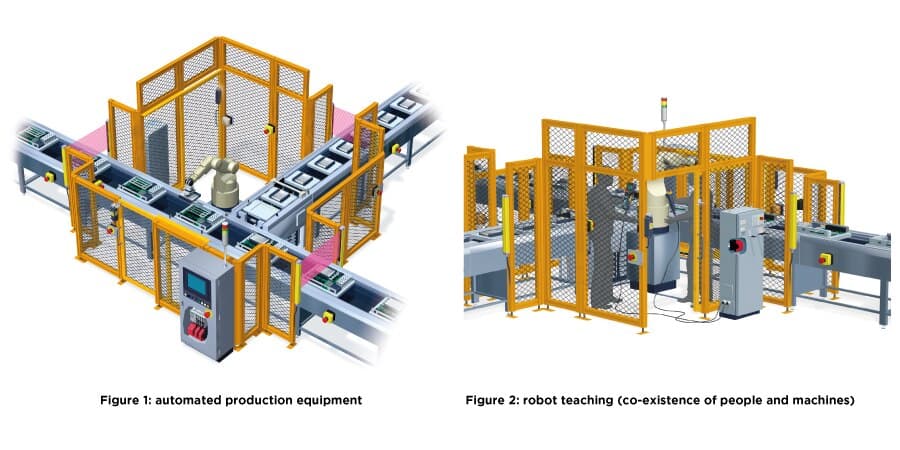
高度自动化的生产设施,如图1所示,似乎不需要人工干预。
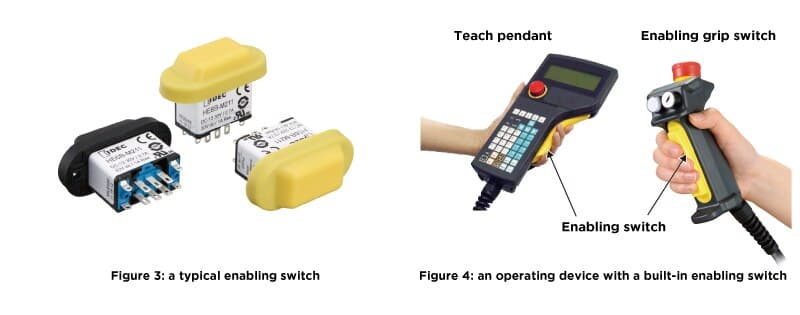
然而,如图2所示,在设备启动、切换或机器人教学操作中,有许多高风险任务比正常操作时的风险更大,例如在设备启动、切换或机器人教学操作中,人员进入安全围栏机器防护(危险区),在机器人手臂等运动部件附近进行人工操作。在这种情况下,3位置使能开关(以下简称使能开关)可以有效地保证安全。
使能开关内置于便携式控制设备中,如机器人教学挂件,允许人类使用使能开关手动操作机器。该开关也是一种安全装置,当人面临迫在眉睫的危险时,可以通过立即反射反应使机器停止运行。
启用开关的操作和用途
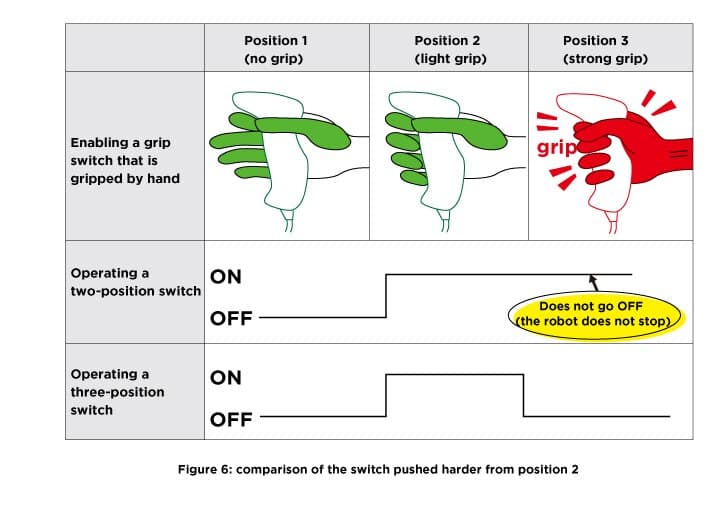
典型的使能开关如图3所示,具有嵌入式使能开关的使能设备示例如图4所示。
按钮3步动作
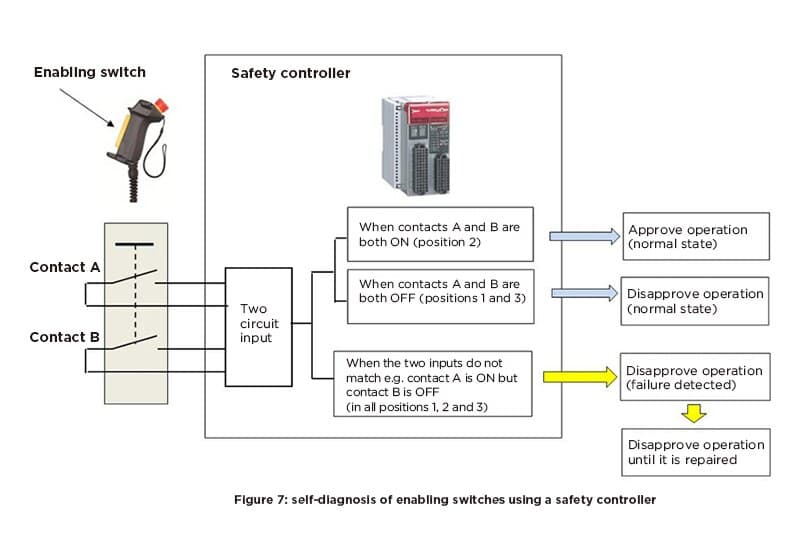
与典型开关的两个位置ON/OFF按钮操作相反,使能开关有三个位置的按钮操作:OFF、ON和OFF。图5显示了按钮操作位置及其触点的开/关状态。
位置1为无按钮操作状态。由于触点断开,因此不允许手动操作机器。
位置2是按钮轻按时的状态。触点接通,允许手动操作机器。只有在这种状态下才能对机器人进行教学。注意,如果从位置2松开手,按钮会回到位置1,触点会关闭,机器会因无法手动操作而停止。
位置3是按钮从位置2进一步按下时的状态。通过禁用机器的手动操作,触点关闭,机器停止。此外,当按钮被推到位置3后返回位置1时,触点将保持关闭状态并返回位置1。

为什么提供位置3?
如果你只是考虑手动操作,位置1和2似乎就足够了。那么为什么要提供位置3呢?这是因为它考虑了人们的反射行为。当遇到意想不到的危险时,人们会有一种本能反应,即放手或握紧双手。
操作者按住位置2,进行教学等操作,开启手动操作。在此过程中,如果由于操作失误或噪音导致机器人或机器意外移动,操作人员将面临危险。当这种情况发生时,操作员被意外的动作吓了一跳,条件反射性地松开教学挂件或条件反射性地紧紧抓住教学挂件。
然而,由于这是操作员受到惊吓时的反射反应,我们无法预先确定反射动作是放手还是握紧教学挂件,要等到时机到来才能知道。因此,设置3位,不仅在松开教学挂件时,也在紧握教学挂件时使机器停止。
故障检测
启用开关是一种可以降低风险的设备,主要用于门联锁失效以及人与机器在机器保护中一起工作的环境。因此,使用使能开关的安全系统必须具有高水平的安全性能,就像门联锁装置一样。
例如,标准通常要求在工业机器人或使用此类机器人的机器人系统中使用启用开关的安全系统满足PL=d与类别3。因此,通过构建为使能开关提供冗余触点并与安全控制器相结合的系统,可以防止使能开关因触点失效而发生危险情况,实现较高的安全性能(图7)。
3位置使能开关应用示例
如前所述,使能开关是人机交互的一种降低风险的措施,它利用操作员的反射反应,在遇到危险时松开或握紧手,以停止机器。它主要安装在机器人教学挂件中,以确保人们在机器人附近教学时的安全。
然而,由于受到惊吓的工人释放或握紧双手的反射反应有助于降低风险,因此它的使用不仅限于机器人。使用使能开关在帮助降低停机是一个安全问题的应用风险方面具有很大的潜力。
鉴于此,在最新的IEC 60947-5-8:2020低压开关设备和控制设备-第5-8部分:控制电路设备和开关元件-3位置使能开关中增加了以下应用示例。(下图摘自IEC 60947-5-8:2020)
以下A.1至A.3展示了机器人领域教学吊坠和手柄开关的应用示例,其中启用开关已主要使用。
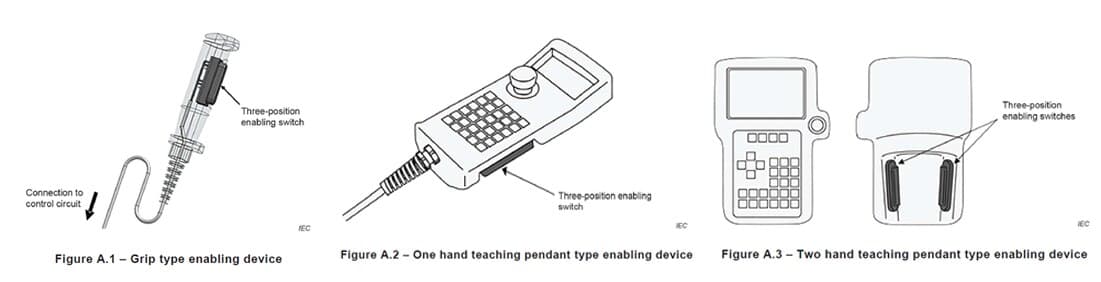
下面A.4至A.8显示了新应用的示例。
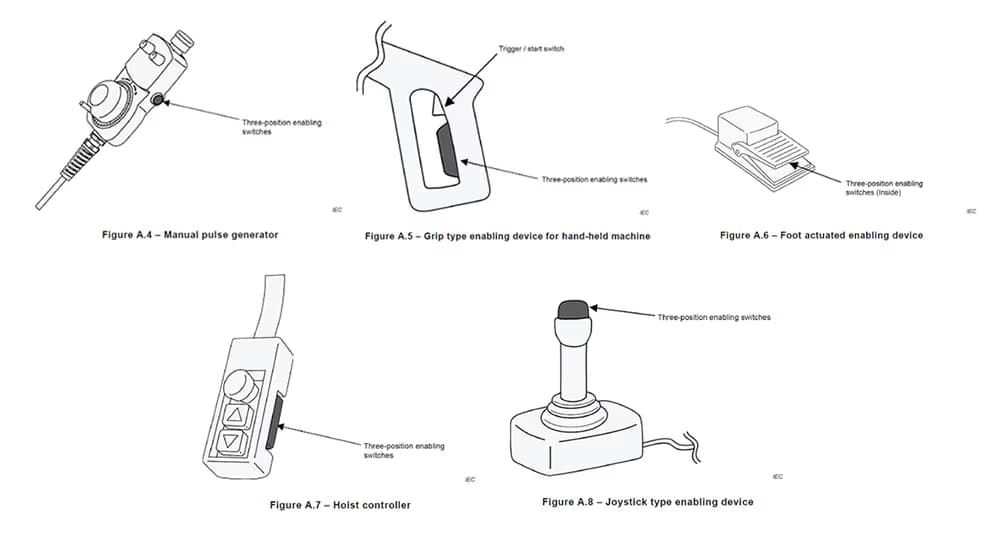
请参考本页了解可用于这些应用程序的启用开关。
